Courses, News
Behavioral Robotic Fabrication
“A system is “soft” when it is flexible, adaptable, and evolving, when it is complex and maintained by a dense network of active information or feedback loops, or, put in a more general way, when a system is able to sustain a certain quotient of sensitive, quasi-random flow.”
— Soft systems, Sanford Kwinter.
Description
Advances in design computation methods and fabrication processes provide new possibilities for designers to explore the manifestation of form in terms of materialization. Form manifestation can be investigated through behavioral approaches that are associated with basic material characteristics and fabrication parameters. Behavior-based approaches expand the design solution space, which previously was unavailable for designers restricted to top-down processes. Behavioral fabrication is a bottom-up process of integrating fabrication constraints and capacities into design processes.
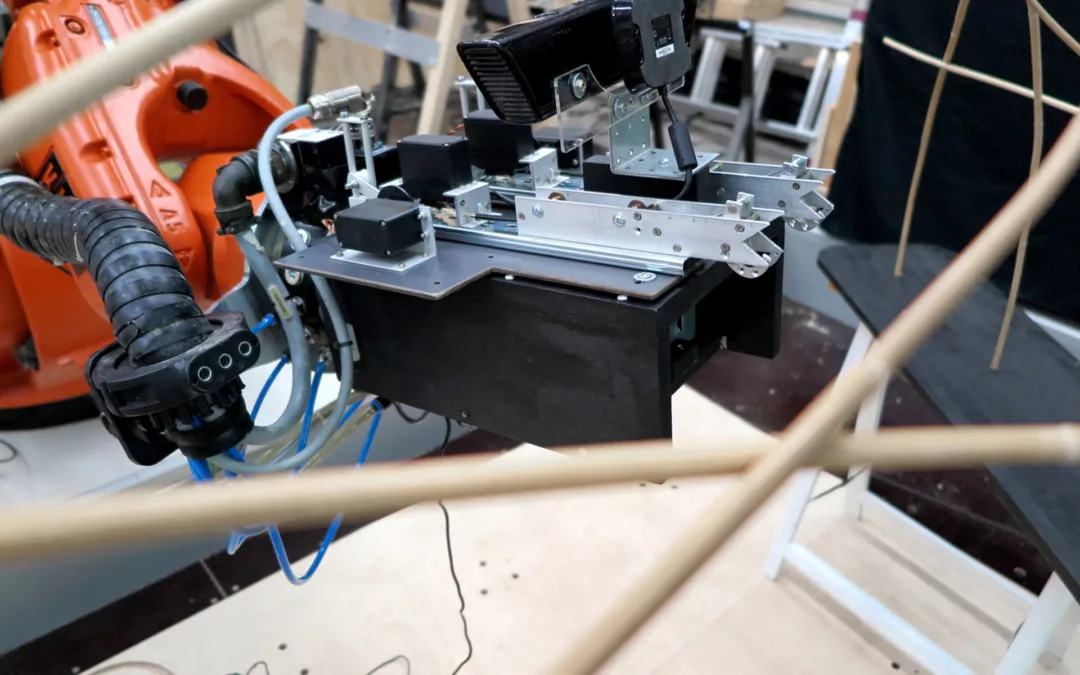
The elective course “Behavioral Robotic Fabrication” introduced students to behavioral fabrication in architectural design. Students learned basic robotic fabrication processes that have been applied in architectural design thus far. Students were introduced to advanced robotic controls for digital fabrication and explored experimental robotic fabrication processes in art and architectural design. Accordingly, students gained practical experience in robotic fabrication by working with an industrial-scale robot, KUKA KR AGILUS.
This course focused on behavioral aspects of robotic fabrication processes, such as on-line, responsive, or interactive robotic controls. Students investigated different types of robotic fabrication tools (end-effectors) to build a custom end effector. Through sensory systems, students developed a soft system to adapt the physical realm of fabrication to the digital design environment.
Image Credit
G. Brugnaro, ICD, University of Stuttgart, 2015.
Courses, News
Wood Proto-architecture II: Integrating Design Computation and Materialization
“It is a question of surrendering to the wood, then following where it leads by connecting operations to a materiality, instead of imposing a form upon a matter.”
— A Thousand Plateaus, Gilles Deleuze and Félix Guattari
Description
The research studio “Wood Proto-architecture II” investigated the generative potential of material systems and fabrication processes in architecture. This studio aimed to explore integrative design computation, which unfolds specific material gestalt and related performative capacities without differentiating between processes of computational form generation and physical materialization. This studio will focus on the design and construction of research installations at the School of Architecture. Following “Wood Proto-architecture I” offered in Fall 2018, students will continue to explore wood material properties and digital fabrication processes to prototype scaled installations.
The studio introduced students to the concept of integrative design computation in architecture. This concept is two-fold: developing material systems and exploring related fabrication tools. The proposed material system is wood, a material with high performance and adaptation. Students investigated the anisotropic and hygroscopic nature of wood to understand tectonic potentials of wood morphology in design processes. Concurrent with developing material systems, students explored the potential of digital fabrication tools, such as robotic fabrication and CNC routing, as generative drivers in design processes.
Synthesizing these two agencies was further explored by developing a computational design framework to minimize the gap between formation and materialization. To achieve this, students developed computational design strategies and conducted a series of small-scale experiments. Students then applied the refined version of their experiments to prototyping a meso-scale installation.
This studio was supported by the elective course “Behavioral Robotic Fabrication,” which introduced students to fabrication agency in the design processes.
Selected Project
Hygrosensitive Kinetic Façade | Developed by: Mingyue Nan, Zhenfang Chen, Liwei Liu, 2019.
Image Credit
Y. Fong, K. Gordon, N. Grimes, M. Ye, University of Virginia, 2018.