News, Projects, Selected Project
Axisymmetric Column No. 1
Description
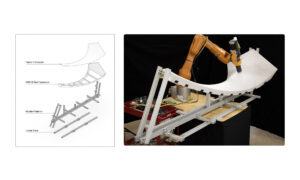
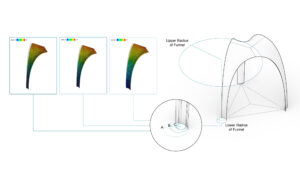
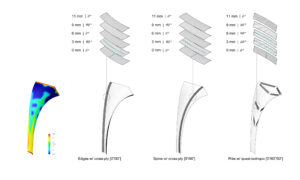
Axisymmetric Column No. 1 exemplifies a novel approach to large-scale robotic additive manufacturing, utilizing curved-layer fused filament fabrication (CLFFF) on a pre-stretched textile. It explores how patterning affects CLFFF printing to develop a lightweight hybrid shell structure. The cross-ply [0°/90°] and quasi-isotropic [0°/60°/90] patterns, inspired by composite engineering, enhance the mechanical properties of SCF-PLA.
Program Development

© CT .lab, University of Virginia.

© CT .lab, University of Virginia.

© CT .lab, University of Virginia.

© CT .lab, University of Virginia.
© CT .lab, University of Virginia.

© CT .lab, University of Virginia.
© CT .lab, University of Virginia.
© CT .lab, University of Virginia.
© CT .lab, University of Virginia.

© CT .lab, University of Virginia.
© CT .lab, University of Virginia.

© CT .lab, University of Virginia.

© CT .lab, University of Virginia.

© CT .lab, University of Virginia.
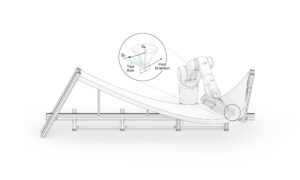
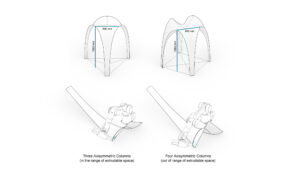
The final unit, including the shell structure and the base, has a height of 2300mm with a span of 900mm, and is reinforced by 10 kg of SCF-PLA pellets. The developed nonplanar robotic 3D printing technique was applied in reinforcing an individual axisymmetric column, which is one column out of three-column vault structure.
Author and Image Credit
Ehsan Baharlou
Project student research assistants
Avery Edson, Juliana Jackson, Eli Sobel, and Tabi Summers
Image Credit
Ehsan Baharlou, CT .lab, University of Virginia, 2023
Acknowledgements
Thanks to Melissa Goldman, fabrication lab manager of the UVA School of Architecture; Dr. Trevor Kemp, fabrication facilities assistant manager of the UVA School of Architecture; and Andrew Spears, fabrication lab technician of the UVA School of Architecture for their profound support.
News, Projects, Selected Project
The Co-designing Circular Plastics project was a small initiative. As proof of concept, PI 3D printed a scaled chair (1:2) with an industrial robotic arm.
Development of a Co-designed Circular Interface
A user interface (UI) was developed to integrate distinct aspects of user-friendly and circular economy.
Implementation of Co-designed Circular Construction
A design-for-fabrication method was developed to integrate material properties and robotic fabrication into consideration. This integrated design method follows the principles of co-designing circular plastics. The process includes the preparation of recycled materials for printing a chair with an industrial robotic arm.
The Result of Co-designed Circular Plastics
A scaled model (1:2) of a chair was designed based on human ergonomics while considering material and fabrication capacities.
Since 2018, PI has developed an advanced technology curriculum that highlights the agency of materials in our built environment. Courses like ARCH5500-Computational design and construction, ARCH5500–Behavioral robotic fabrication, ARCH 5500-Cognitive design and fabrication, and ARCH5500-Robotic additive manufacturing focus on applying advanced technologies in design. This fund supported these ongoing curricula to advance UVA’s position in sustainability for design and construction. It helped students learn a new economic model in design and construction.
Project Funding
This project was funded by the Jefferson Trust.
Related Projects
This project was further developed through additional funding from the Jefferson Trust in Chair No. 7.
Author and Image Credit
Ehsan Baharlou
Image Credit
Ehsan Baharlou, CT .lab, University of Virginia, 2023

Selected Project
Generative Crossed Timber System
Description
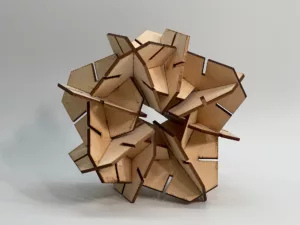
The project “Generative Crossed Timber System” creates an open-ended timber system that can form different architectural elements by applying the notion of generative design, the materiality of wood, and digital fabrication. This project was named the best in student design in Fast Company’s 2022 Innovation by Design Awards.
Project Development

© C. MacDonnell, Z. Shen, Y. Zhou, 2021.
© C. MacDonnell, Z. Shen, Y. Zhou, 2021.
© C. MacDonnell, Z. Shen, Y. Zhou, 2021.
© C. MacDonnell, Z. Shen, Y. Zhou, 2021.
© C. MacDonnell, Z. Shen, Y. Zhou, 2021.

© C. MacDonnell, Z. Shen, Y. Zhou, 2021.
© C. MacDonnell, Z. Shen, Y. Zhou, 2021.
© C. MacDonnell, Z. Shen, Y. Zhou, 2021.
© C. MacDonnell, Z. Shen, Y. Zhou, 2021.
© C. MacDonnell, Z. Shen, Y. Zhou, 2021.
© C. MacDonnell, Z. Shen, Y. Zhou, 2021.

© C. MacDonnell, Z. Shen, Y. Zhou, 2021.

© C. MacDonnell, Z. Shen, Y. Zhou, 2021.

© C. MacDonnell, Z. Shen, Y. Zhou, 2021.
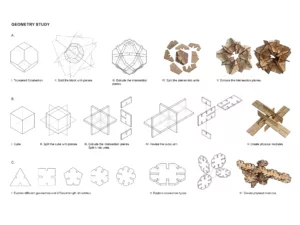
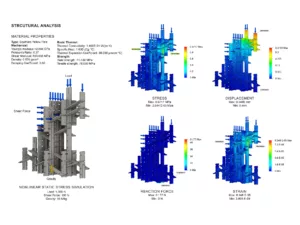
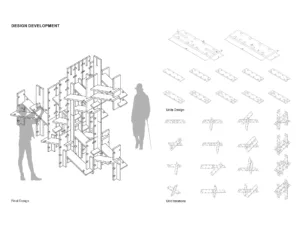
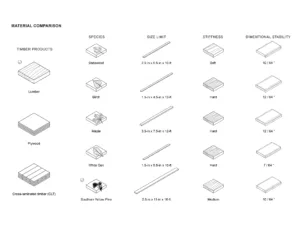
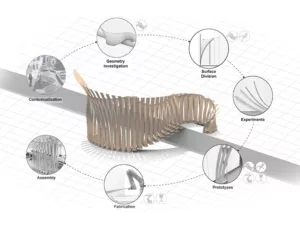
A cross-referencing method—which includes geometry study, material study, fabrication tests, and structural analysis—was developed by this research collective to serve as the driving force of this project. The feedback among each approach provides guidelines for future research and practice. The geometry study shaped the form-searching process and provided theoretical support for the unit design. It provided greater understanding of the physical properties of different geometries and connection methods. The material study focused on material dimension, grain orientation, stiffness, and elastic properties.
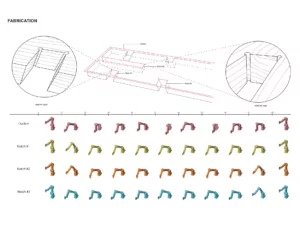
Three key elements of the final design came from the fabrication test: 1) the milling speed of the current robot setup limits the scale of final structure, 2) the dimension limitation and maximum load of the robot affects the form and size of the unit, and 3) the accuracy of the robotic fabrication and the bending behavior of wood material during the change of air humidity required more tolerance to be considered during the unit design process. The final design was also guided by the feedback of the structural analysis, which centered around the structural performance.
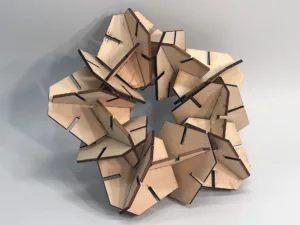
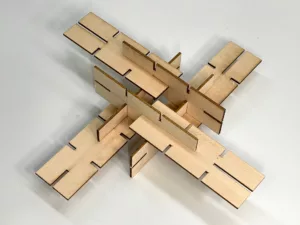
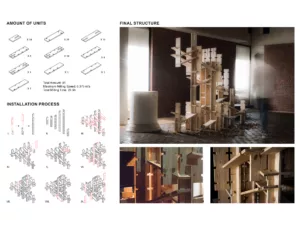
The final form consists of 81 pieces of pine lumber that are only connected by notches of different dimensions. The single size of each piece is 1”x 7” x 28”. The column-like structure can be re-formed to other architectural elements by rearranging the units and can be extended to other scales by aggregating through the opened notches.
Author and Image Credit
Chris MacDonnell, Ziwei Shen, Yuwen Zhou.
Instructor
Ehsan Baharlou

Selected Project
Robotic Serpentine Wall
Description
The project “Robotic Serpentine Wall” investigates new, unexpected uses of wood to construct an inhabitable structure. It created a structure that 1) celebrates steam bending’s ability to radically change wood’s structural potential; 2) is inhabitable, improves the site on which it was built, and is connected with the history of its larger context; and 3) was data- and mathematically driven.
Program Development

© L. Kirssin, B. Penny, T. Rhodes, (Photographer: Kwadwo Tenkorang), 2020.
© L. Kirssin, B. Penny, T. Rhodes, 2020.
© L. Kirssin, B. Penny, T. Rhodes, 2020.

© L. Kirssin, B. Penny, T. Rhodes, 2020.

© L. Kirssin, B. Penny, T. Rhodes, (Photographer: Kwadwo Tenkorang), 2020.

© L. Kirssin, B. Penny, T. Rhodes, (Photographer: Kwadwo Tenkorang), 2020.

© L. Kirssin, B. Penny, T. Rhodes, (Photographer: Kwadwo Tenkorang), 2020.
© L. Kirssin, B. Penny, T. Rhodes, 2020.
© L. Kirssin, B. Penny, T. Rhodes, 2020.

© L. Kirssin, B. Penny, T. Rhodes, (Photographer: Kwadwo Tenkorang), 2020.

© L. Kirssin, B. Penny, T. Rhodes, (Photographer: Kwadwo Tenkorang), 2020.
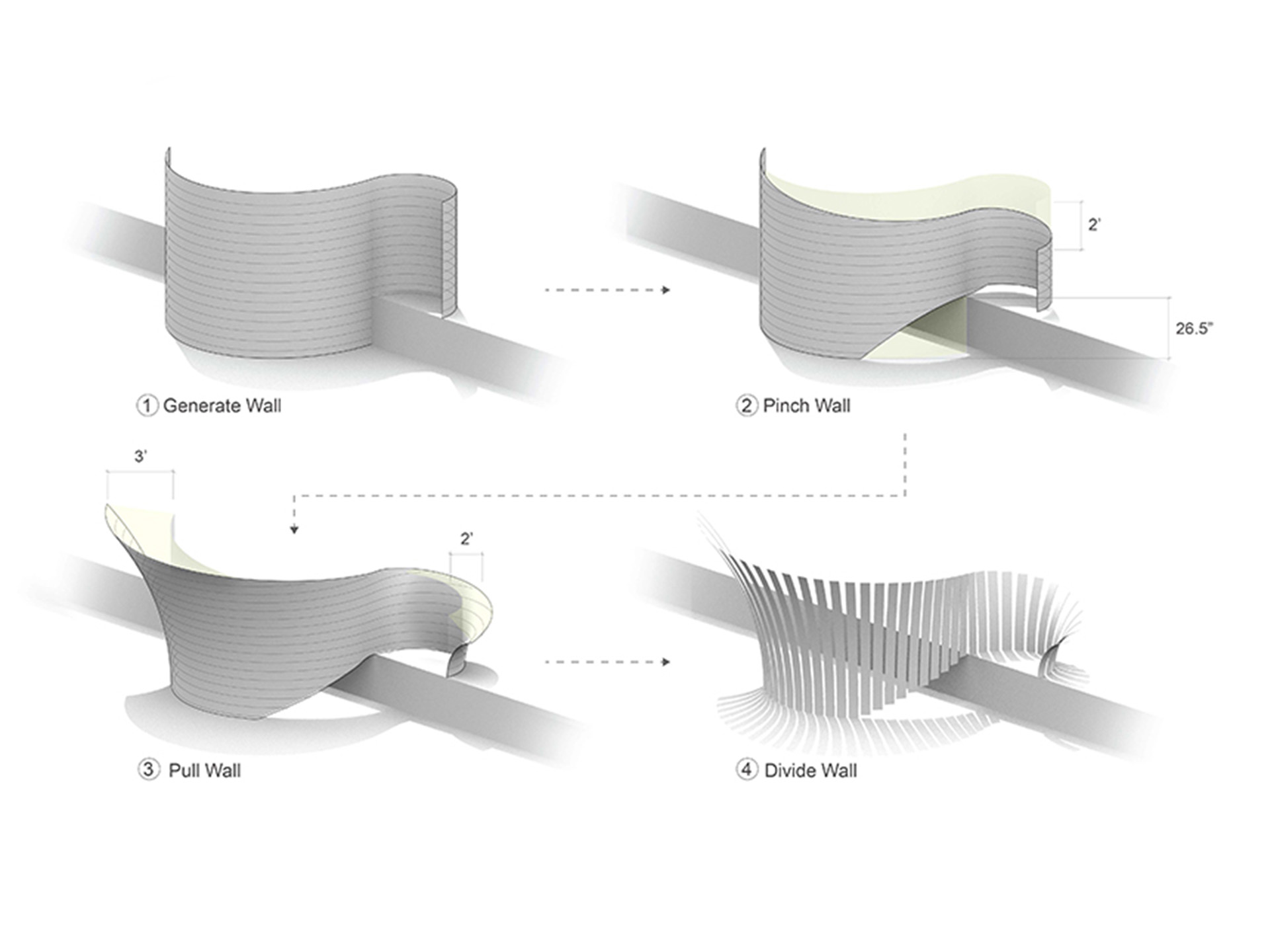
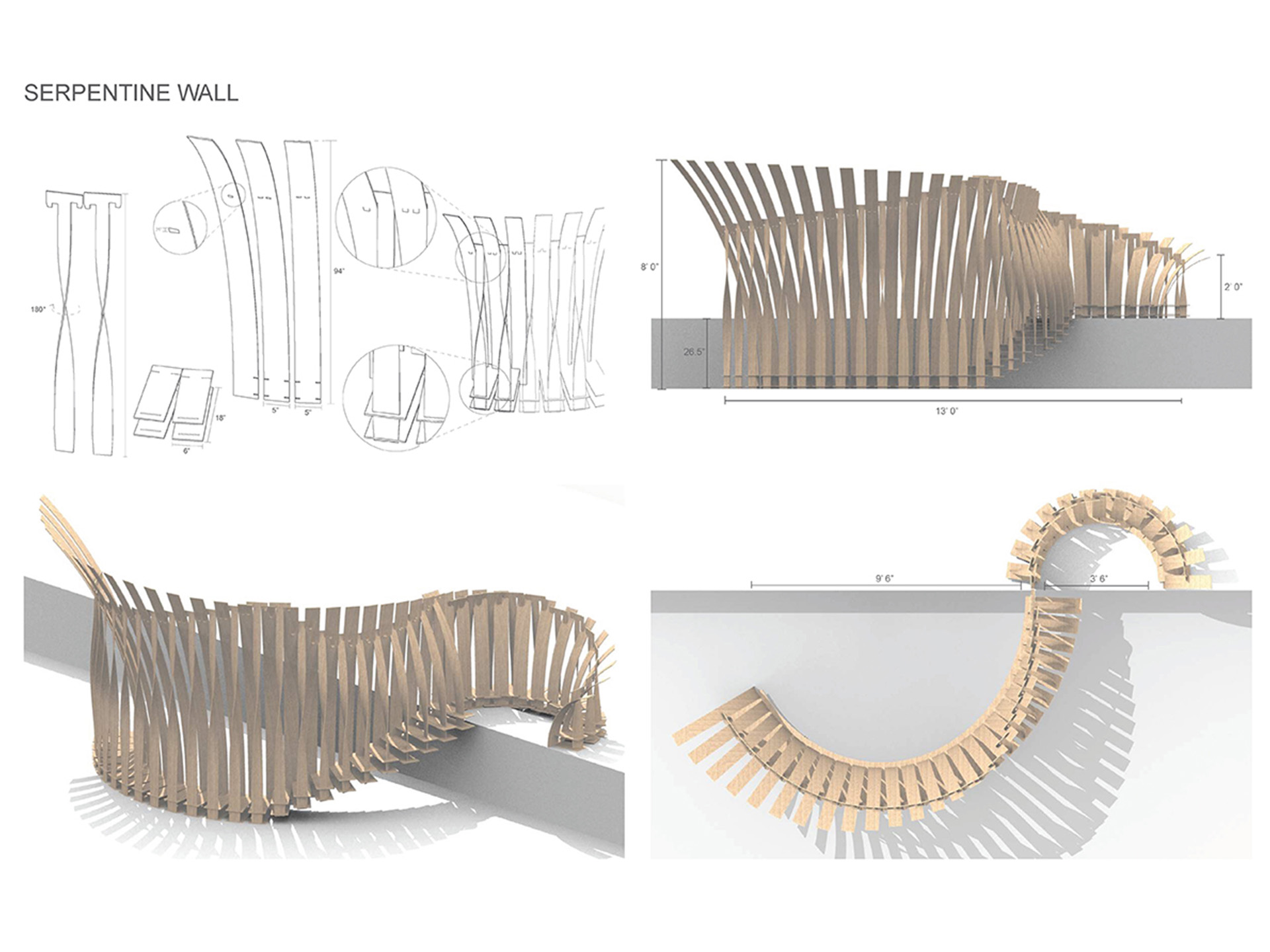
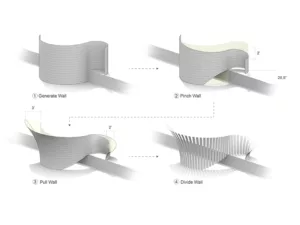
This project responded to its site—the North Terrace of UVA’s School of Architecture—in two ways. First, it negotiated the step between the ground and the top of the planter box, a distance of 26 ½”, in a way that encourages small group interactions. Second, the form responds to the complex history of serpentine walls at UVA. This sinusoidal shape was manipulated to create a structure that produced a small gathering area on one side and a seat on the other. It was then reverse-engineered to minimize the number of unique components upon construction.
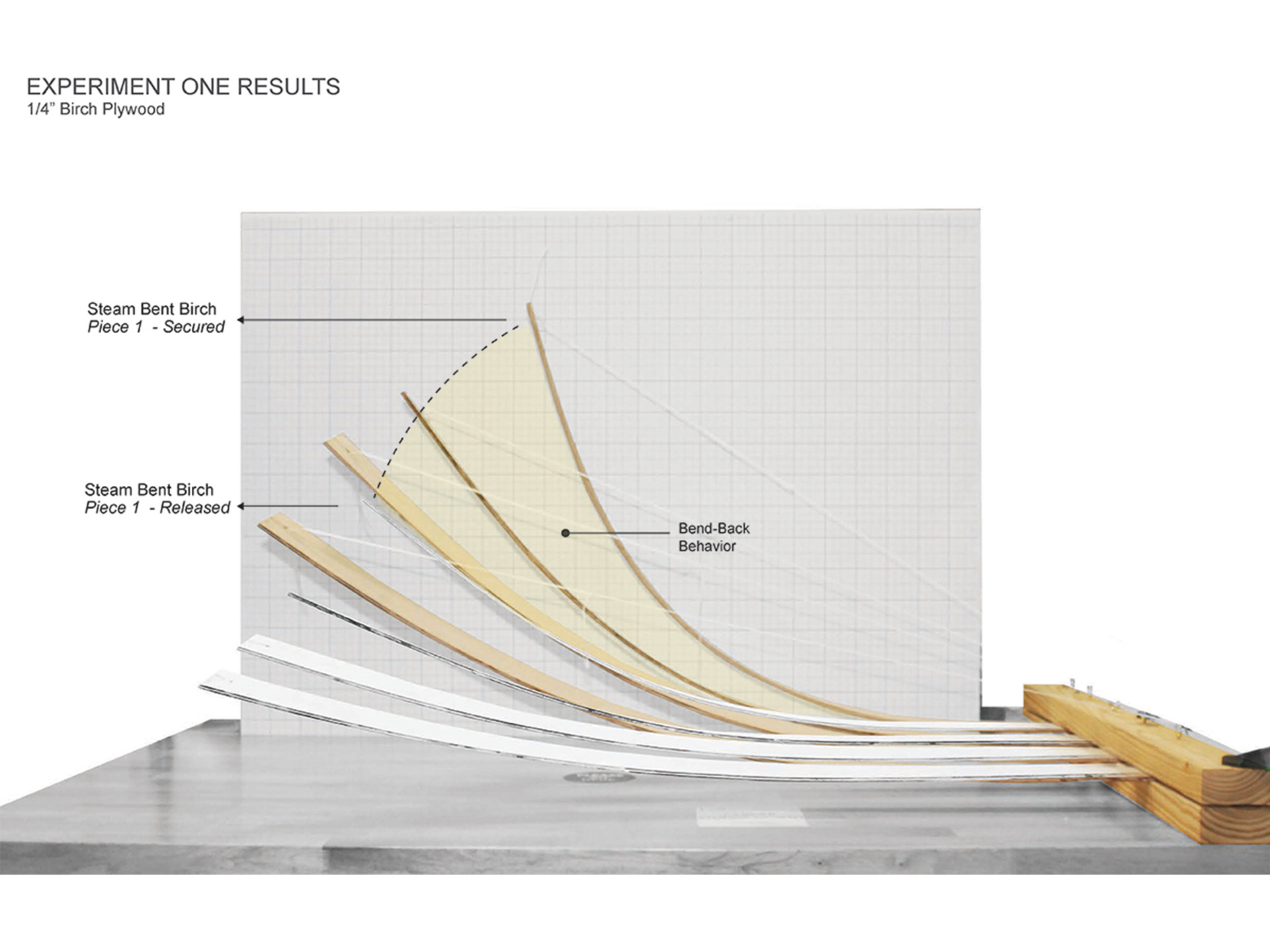
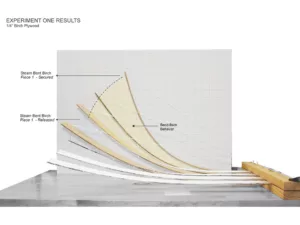
Several experiments were conducted to test the amount that pieces of birch plywood and oak plywood reverted to their original shape following steaming and either bending or twisting; birch plywood performed better in both. A third experiment determined plywood pieces needed to be a minimum length of 24” to prevent cracking as a result of twisting.
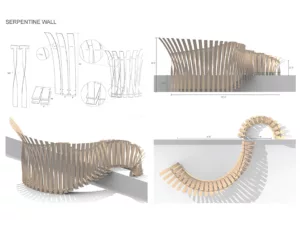
Prototyping the structure led to the discovery that the primary pieces work in tension, not compression. This in turn resulted in the inclusion of additional support pieces for greater structural stability.
The final design was constructed through a complex process of cutting, twisting and bending, and slotting the pieces together. Each piece was machine cut according to the specific measurements dictated by the digital design. They were then steamed before being twisted and bent into position, allowed to dry, and put together. The final assembly process revealed that the connections between wall sections were necessary for the structure to be free-standing.
This project was awarded the 2021 Bruce Abbey Technology Award. It was featured on the University of Virginia School of Architecture’s website.
Author and Image Credit
Leah Kirssin, Bay Penny, Trenton Rhodes.
Instructor
Ehsan Baharlou