MyCoLab: Robotic Fabrication of Architectured Mycelium Composites for Sustainable Construction
Description
Increasing awareness of the embodied carbon footprint of buildings has shifted interest in the construction industry towards the development of renewable and biodegradable materials to create a sustainable built environment and circular economy.
Mycelium, a subsurface system of fungal hyphae, has unique characteristics that can be leveraged to produce low carbon, energy-efficient, bio-based building materials. When combined with organic substrates such as sawdust, straw, or hemp, mycelium develops a network of extremely dense fibers and acts as a natural binder to create composite materials without a need for energy input or synthetic adhesives. Mycelium-bonded composites have been commonly fabricated by pouring the substrate and mycelium spawn into a mold and leaving it for the mycelium to grow.
Although molding is a simple process in fabrication, it bears two limitations that cripple the adoption of this approach for sustainable construction. First, this fabrication process limits the size, especially the depth, of end products. Fungal growth in the core of large-size components remains challenging due to the organism’s need for oxygen for optimal growth. Second, the shape and complexity of elements depend on the availability of molds, which limits design freedom. Novel strategies that eliminate the need for molds, whether single use or reusable, will lead to more sustainable construction practices.
Recent advances in additive manufacturing have enabled the design and fabrication of complex, innovative materials that are technologically and economically feasible. Linking these advantages offered by a new manufacturing technique with data-driven material design approaches will set the groundwork for achieving dramatic progress in the fabrication of large-scale circular mycelium composites.
This CoLab project brings together a cross-disciplinary team to develop the fundamental knowledge needed to exploit the unique properties of mycelium in the fabrication of high-performance composite materials for building applications. The team hypothesizes that by altering the inner makeup of mycelium composites, including composition and internal structure at the microlevel and at larger length scales, inventive materials with improved thermal, acoustic, and mechanical properties can be designed.
The goal of this pilot study is to develop an understanding of key factors that affect the performance of additively manufactured mycelium composites. The successful demonstration of these ideas will position the team to compete strongly in major external funding opportunities and emerge as leaders in the Sustainable Construction research program.
Project Team
Ehsan Baharlou (Assistant Professor, School of Architecture), Prasanna Balachandran (Assistant Professor, Dept. of Material Science & Engineering), Osman Ozbulut (Associate Professor, Dept. of Engineering Systems & Environment)
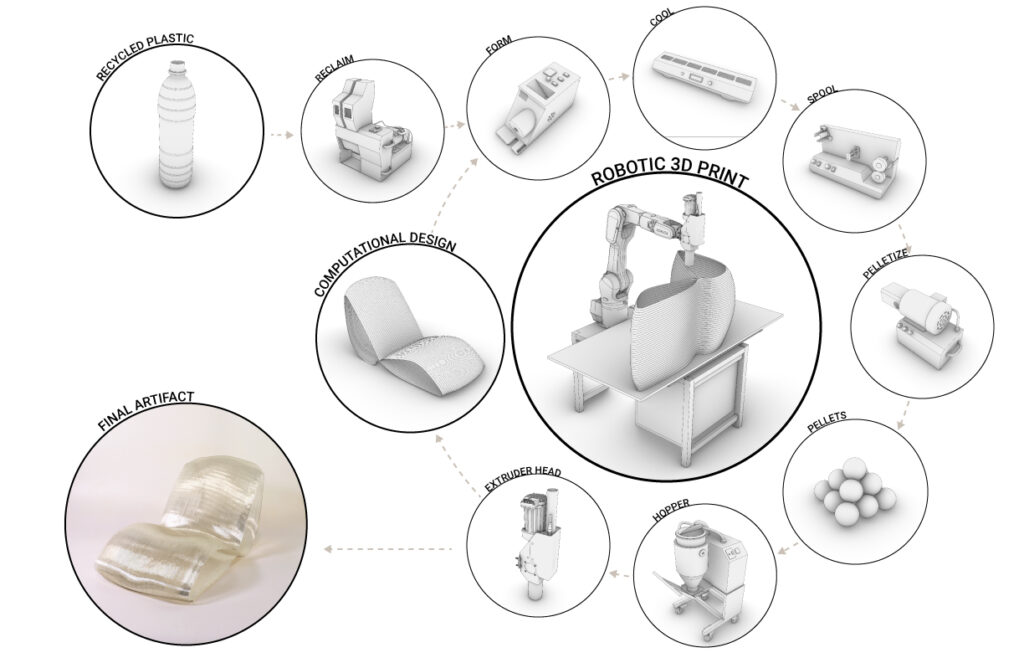
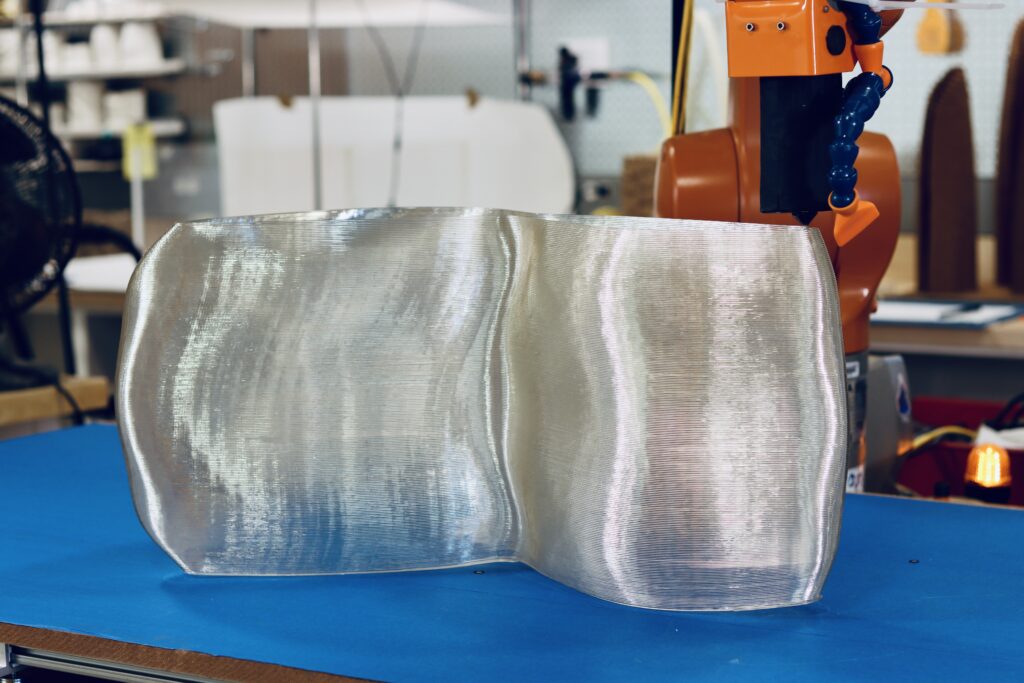
The Co-designing Circular Plastics project was a small initiative. As proof of concept, PI 3D printed a scaled chair (1:2) with an industrial robotic arm.
Development of a Co-designed Circular Interface
A user interface (UI) will be developed to integrate distinct aspects of user-friendly and circular economy.
Implementation of Co-designed Circular Construction
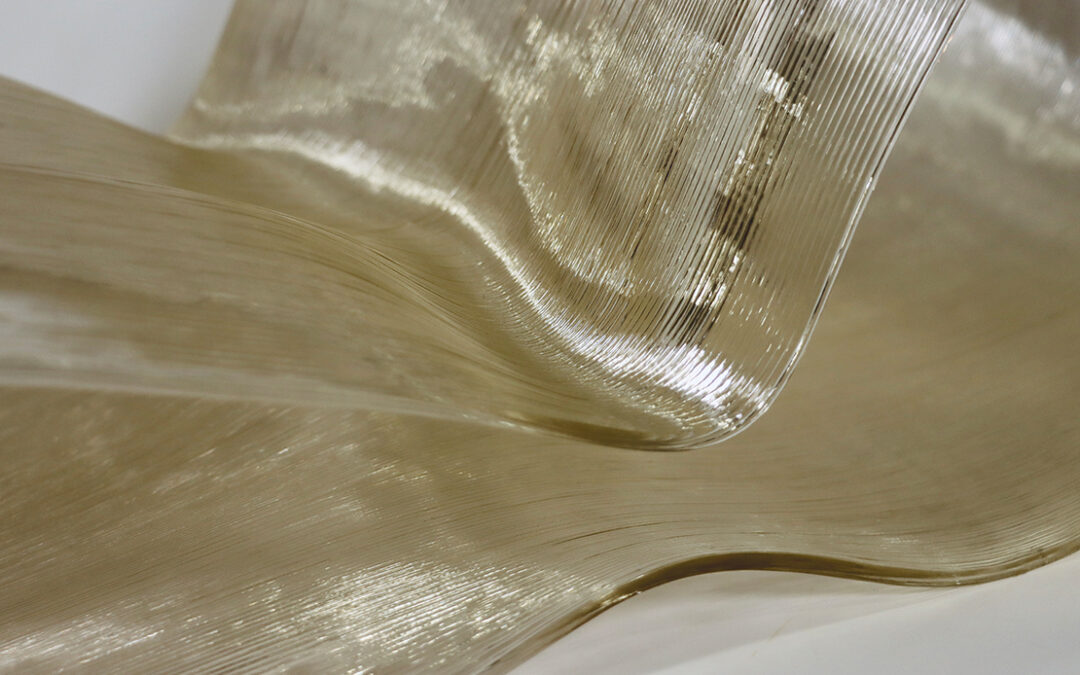
A design for fabrication method has been developed to integrate material properties and robotic fabrication into consideration. This integrated design method follows the principles of co-designing circular plastics. The process includes the preparation of recycled materials for printing a chair with an industrial robotic arm.
The Result of Co-designed Circular Plastics
A scaled model (1:2) of a chair was designed based on human ergonomics while considering material and fabrication capacities.
Since 2018, PI has developed an advanced technology curriculum that highlights the agency of materials in our built environment. Courses like ARCH5500-Computational design and construction, ARCH5500–Behavioral robotic fabrication, ARCH 5500-Cognitive design and fabrication, and ARCH5500-Robotic additive manufacturing focus on applying advanced technologies in design. This fund supported these ongoing curricula to advance UVA’s position in sustainability for design and construction. It helped students learn a new economic model in design and construction.
Author and Image Credit
Ehsan Baharlou
Image Credit
Ehsan Baharlou, CT .lab, University of Virginia, 2023
“The manifest form—that which appears—is the result of a computational interaction between internal rules and external (morphogenetic) pressures that, themselves, originate in other adjacent forms (ecology).”
— Who is afraid of formalism?, Sanford Kwinter.
Description
Emerging advanced technologies utilize the developments of rapid additive manufacturing (RAM) to scale up the design from small scales to building scales. Robotic additive manufacturing techniques allow designers to construct buildings or materialize building elements in a short time. Robotic additive manufacturing, which usually necessitates a layer-by-layer approach or lattice structure, requires understanding the relationship between form, material characteristics, and robotic fabrication techniques.
The elective course “Introduction to Robotic Additive Manufacturing” introduced students to robotic additive manufacturing for architectural design. Students established their fabrication system to explore the practical potential of this technique in an ecological construction. They applied robotic 3D-printing with pellet-based extruders (Biodegradable materials) or paste-based extruders (quasi-solid materials).
Students were introduced to a variety of robotic additive manufacturing techniques, including Fused Deposition Modelling (FDM). They learned the principles of a design-to-fabrication process that incorporates design strategies, fabrication constraints, and material properties. This process involves 1) 3D-modelling a deep screen, wall, or façade system; 2) preparing materials and design for fabrication; and 3) robotic 3D-printing a design deep surface. Students then applied these principles on designing and prototyping a scale model of an ecological building skin/deep surface.
Two workshops supported this course. The first was on computational design, a parameter-based design process that includes sketching, designing, simulating, and manufacturing a conceptual design. The second focused on robotic 3D-printing, which is a numerical-based fabrication process that includes advanced robotic controls and programming.
Image Credit
L. Fentress and T. Victorio, University of Virginia, 2021.
“Technology is the answer, but what was the question?”
— Cedric Price, 1966.
Description
This studio focused on ecological construction to explore the potential of mass timber technologies to address new and growing climate change threats. It introduced students to applying the process of design to the construction of mass timber systems. Using mixed-reality technologies, students developed a co-design framework to shift from material- and fabrication-centered design processes to human-centered design-making. They were directly involved in the entire process, from design to construction. The aim of this research studio was to develop [augmented] robotic fabrication to construct experimental mass timber structures at the school of architecture.
This studio aimed to introduce students to mass timber design in architecture. It included four phases: 1) wood science, 2) wood processing, 3) wood construction, and 4) mass timber system design. In wood science, students learned wood anatomy and related physical and mechanical properties of wood, such as hygroscopic and anisotropic behaviors. In wood processing, students were introduced to wood manufacturing of mass timber systems such as cross laminated timber (CLT), glues laminated timber (glulam), and nailed laminated timber (NLT). Through a series of case studies, students explored wood processing such as lamination and connections to generate spatial wood tectonics.
In wood construction, students examined different construction techniques such as CNC milling and robotic fabrication to prototype small-scale timber systems. In the final phase of this studio, students designed a building element. The envisioned elements were 1) an abstracted skin or wall system, 2) a tower or a column as a structural element, 3) a vault or a shell as a roof system, 4) a hut or a shed, or other invented building elements. This one-to-one timber structure was designed for Campbell Hall’s North Terrace at UVA.
Students also explored design space as a parametric space through a parameter-based framework. The computational framework geometrically differentiated and parameterized timber wood structures. This framework integrated the fabrication constraints and material characteristics as generative drivers. Students learned advanced robotic controls to understand the role of fabrication agency in timber construction. They applied additive and subtractive robotic fabrication to develop a tectonic connection between timber elements. Students collaborated in fabrication and assembly processes through mixed-reality (MR) technologies to apply their design intention in real-time. Students applied these three methods to prototype scaled models which enabled them to understand the augmented process of design-to-construction of a one-to-one demonstrator.
To provide the best experiences, we use technologies like cookies to store and/or access device information. Consenting to these technologies will allow us to process data such as browsing behavior or unique IDs on this site. Not consenting or withdrawing consent, may adversely affect certain features and functions.
Functional
Always active
The technical storage or access is strictly necessary for the legitimate purpose of enabling the use of a specific service explicitly requested by the subscriber or user, or for the sole purpose of carrying out the transmission of a communication over an electronic communications network.
Preferences
The technical storage or access is necessary for the legitimate purpose of storing preferences that are not requested by the subscriber or user.
Statistics
The technical storage or access that is used exclusively for statistical purposes.The technical storage or access that is used exclusively for anonymous statistical purposes. Without a subpoena, voluntary compliance on the part of your Internet Service Provider, or additional records from a third party, information stored or retrieved for this purpose alone cannot usually be used to identify you.
Marketing
The technical storage or access is required to create user profiles to send advertising, or to track the user on a website or across several websites for similar marketing purposes.





![[non-standard] Mass Timber Architecture](https://ct.lab.virginia.edu/media/2023/09/2020_CT_KH_JM_DT_TN-1080x675.webp)